在如今科技发展得越来越快的时代,学生们做出来的科技作品就像夜空中闪亮的星星,不断给创新带来新的亮点。最近,yl7703永利电子创新实验室的蔡智辉、谢平平等学生团队研发出一款作品“STM32智能平衡车”引人注目,它设计独特,性能优秀。
初心如磐:兴趣与挑战的双重驱动
蔡智辉说:“最开始想做这款STM32平衡车,原因很简单,就是我对平衡车特别感兴趣,同时也想看看自己学习得怎么样,可不想做一个只能拿去比赛,没什么实际用处的东西。”兴趣就像一把火,能让他们对探索科技的未知领域充满热情;想检验学习能力的想法,就像一座灯塔,给他们指明前进的方向,让他们在追求创新的路上不怕困难,一直往前冲。
披荆斩棘:困难与突破的交织征程
在搞硬件协同和优化算法的过程中,他们碰到了两个大难题。在硬件系统集成方面,电机启动和停止的时候,会产生很大的电流冲击,这就像一股暗流,通过共地耦合影响微控制器和传感器的供电稳定,让MPU6050采集的姿态数据不准确了。这就好比在一个精密的仪器里进了脏东西,让整个系统都乱套了。为了解决这个问题,他们精心设计了两级供电方案,把DC - DC转换器和LDO线性稳压器结合起来,还加了域隔离电路,就像给仪器装了一个精密的过滤器,让数据又准确了。
在模块匹配方面,L298N或者TB6612驱动芯片的电流输出得和直流减速电机的规格相匹配,这就像跳舞一样,每个动作都得恰到好处。编码器接口和STM32定时器的正交编码模式在配置的时候,容易出现计数误差,让速度反馈不准确,这就像高速运转的齿轮里卡了个小石子,影响机器正常运行。他们不停地调整、优化,让每个模块都能配合得很好。
控制算法调试也遇到了麻烦。PID参数整定特别复杂,角度环、速度环和位置环的Kp、Ki、Kd参数相互影响,调试的时候得先调角度环,再调速度环。光是角度环的参数,就得测试好几百次才能让平衡车稳定直立。这就像在迷宫里找出口,每次尝试都有可能离目标更近,也有可能越走越远。平衡车动态平衡稳定性不好,在坡道上走或者被外力推一下,重心一偏移就会失去平衡。他们优化了控制周期,提高了电机的响应速度,就像给平衡车加了更厉害的动力和更灵敏的反应能力。
硕果盈枝:收获与成长的丰硕之果
俗话说“宝剑锋从磨砺出,梅花香自苦寒来”。他们经过不断努力和探索,收获颇多。在硬件方面,他们学会了STM32F103C8T6的外设配置、PCB布局技巧,也明白了怎么在选轻质材料和保证结构强度之间找到平衡。在软件方面,他们能熟练用前后台系统来安排实时任务,掌握了中断驱动式数据采集、PWM波形、串口通信等嵌入式编程的核心技能。这些收获不光是知识多了,能力也提升了,为他们以后搞科技打下了坚实的基础。
展望未来:梦想与责任的双重担当
结合电子信息工程专业的学习方向,还有做STM32智能平衡车积累的技术,他们对未来有两个规划。一是参加学科竞赛,他们会进一步提升作品的性能,把避障、巡线等关键功能完善好,优化代码结构和调试流程,全力准备全国大学生智能车竞赛、电子设计竞赛等重要比赛,给学校争光。二是帮助学弟学妹学习,他们会把这款平衡车当成实践平台,编写一套完整的STM32学习资料,让实践变得简单点,帮助学弟学妹提高专业应用能力。
“路漫漫其修远兮”,STM32智能平衡车的故事还没完。它不只是一个科技作品,更是学生们创新精神的代表,是他们追求科技梦想的证明。相信在以后的日子里,他们会带着这份热情和坚持,在科技的道路上越走越远,创造更多的精彩!
【作品简况】
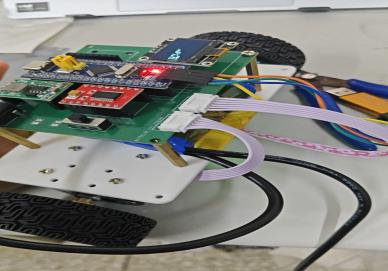
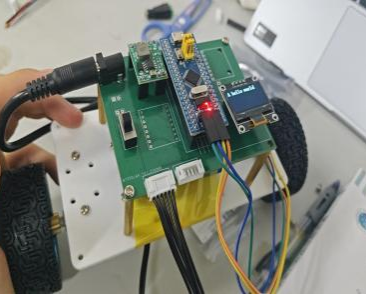
作品名称:STM32智能平衡车
作品简介:这款STM32智能平衡车以STM32F103C8T6为主控,搭载MPU6050与双环PID算法,实现稳定自平衡。支持遥控、避障、巡线等功能,硬件模块化易拓展,适配教学实训、竞赛及智能硬件开发场景。
设计学生:2024级电子信息工程3班 蔡智辉,谢平平
指导老师:叶玉杰,韩彩霞

